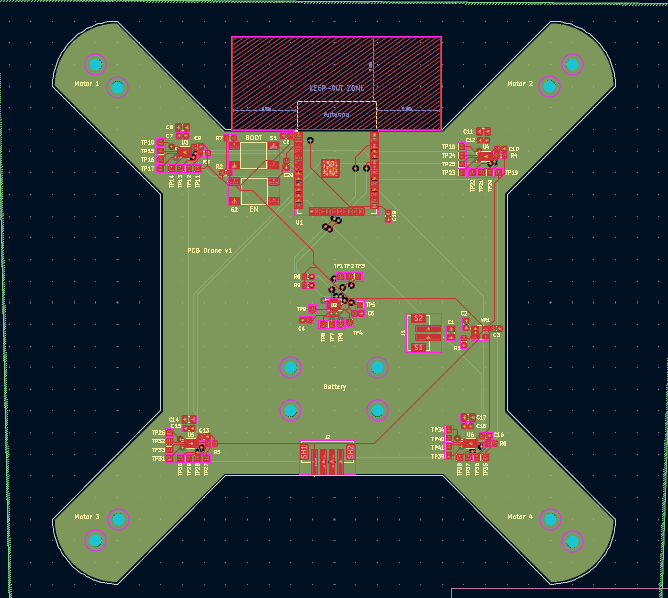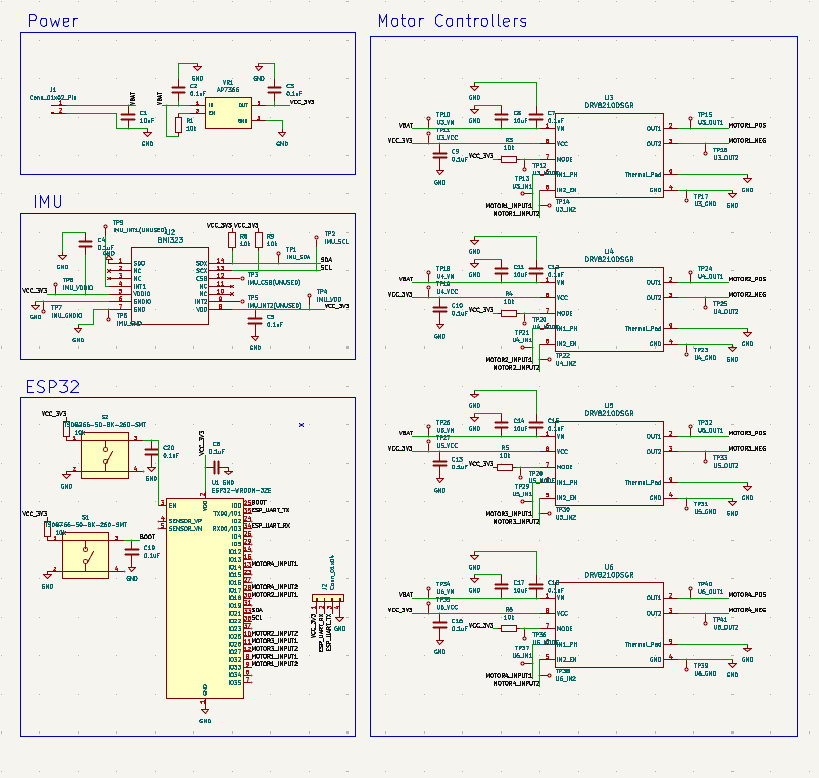
Drone Schematic
This PCB drone is fairly simple in design. It runs off of an ESP32 MCU, and uses a basic IMU IC. The drone uses a 3.7 V lipo battery, which goes into a LDO to drop it to 3.3V to send it to the MCU. We have a dc brushed motor controller on each corner of the drone corresponding to each motor it uses.
Drone Firmware
The firmware is based in C, developed in ESP-IDF. It utilizes FreeRTOS architecture to enable PID flight control, and also uses I²C sensor sampling to allow for continuous system updating. It also uses the ESP32 antenna to allow for wireless telemetry to allow users to monitor the system and control the drone on a laptop.